
Introduction

Overview
TDK Ventures has identified the energy-saving and environmental advantages that electric vehicles can deliver as a major focus area for investment and commercialization. We are bullish on energy storage, self-driving cars, and other components of the global electrification phenomenon that is transforming so much of our lives today. We believe that Faction will establish itself as a leader in this industry by creating driverless light electric delivery vehicles that make last-mile delivery more efficient, reduce pollution, reduce traffic congestion, and increase roadway safety.
This article highlights the process I took in deciding to invest in Faction. Here, I discuss the consideration that bore on the decision and the analysis we used to determine how TDK Ventures could assist Faction in bringing its vision to market and scaling its impact.
Introduction & Technical Evolution
Recent advances in artificial intelligence, machine learning, light detection and ranging (LiDAR), global positioning systems, radar, and other sensors have increased safety and security across many industries. At the same time, these technologies also have propelled the driverless ground vehicle vertical from Level 0 (no driving automation) to the realization of Level 3 (conditional driving automation) in less than a decade. Passenger vehicles likely will require significantly more time to evolve from this level, which still requires a human driver, but allows the vehicle to manage some safety-critical functions, such as braking and steering under certain traffic and weather conditions. Companies like Faction that are developing driverless commercial vehicles can harness and improve the technology immediately.
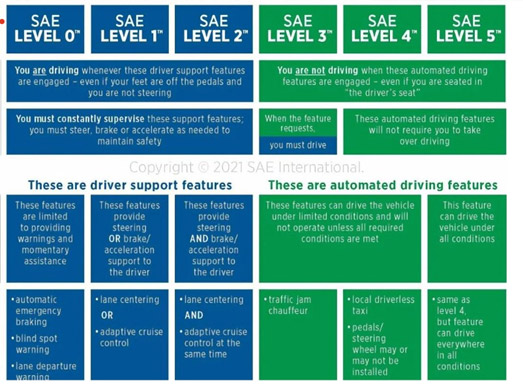
Source: https://www.sae.org/blog/sae-j3016-update
This next step marks the first realization of a dream that humans have nurtured nearly since the invention of the automobile. General Motors broached the notion of making this science-fiction vision fact at the 1939 World’s Fair. GM and architect Norman Bel Geddes built a huge diorama of a clean, green, future city, complete with cars traveling the freeways using “automatic radio control,” >[13]. Over the next 15 years, the car company worked on electronic systems for steering and maintaining safe following distances “without the driver’s hands on the steering wheel.” [15]. Other car-making hubs and companies quickly got in on the act. By 1977 automakers in Japan had installed cameras and image processors to identify and instruct automobiles to react to road conditions. Automakers in Germany improved on the video quality and process times to demonstrate the Mercedes-Benz VaMoRs driverless van that could operate at near-highway speeds.
Current advances allow vehicles to take over steering, parallel parking, and braking tasks from human drivers. This present state enables semi-autonomous vehicle operation. While many are optimistic that fully autonomous automobiles can be commercially available within the next decade, formidable challenges remain. Until these hurdles can be overcome — whether in the 2030s or beyond — drivers will be required to perform some tasks in order to navigate any vehicle from point A to point B.
These semi-autonomous vehicles rely on redundant and varied sensors to operate safely. The development of this equipment and drastic reduction in latency and processing time makes driverless operation possible. Testing and validation procedures have been developed and improved to the point where they can be deployed in combination to detect, comprehend, and respond to most road conditions and events.
Cameras — Visible spectrum and infrared cameras capture images beyond the capabilities of human sight. Using multiple cameras gives autonomous vehicle guidance and operation systems 3-dimensional, 360-degree representations of the environment. Incorporating the infrared spectrum mitigates the effects of rain, fog, smoke, glare, and other conditions that can obscure cameras’ vision [14]. The mid-infrared thermal cameras also can detect the body heat emitted by people and animals and trigger evasive maneuvers [9] [6]. Cameras are powerful tools for noting and analyzing the conditions under which these vehicles operate. Indeed, humans’ perception of their environment when driving is almost exclusively visual, encouraging Tesla and others to explore the possibility of using only cameras for autonomous vehicle navigation [4].
RADAR — Radio detection and ranging shoots radio frequency waves across a field where they strike any object in their path and are reflected back and collected by receiving antennae. Comparing a series of echoes enables the system to determine an object’s location, movement direction, and speed. RADAR is used to detect objects in front of and to the side of an autonomous vehicle, including oncoming and parallel lane traffic, obstacles, stalled vehicles, and pedestrians. RADAR also can detect stationary objects.
LiDAR — Similar to RADAR, light detection and ranging measures an object’s distance by recording the time it takes for an infrared pulse of light to travel from a laser-emitting diode to the object and back to laser diode and back to the system’s receiver. This “time of flight” measurement is much more accurate than those produced by stereoscopic cameras [14]. Cameras can only provide two-dimensional representational mapping of three-dimensional objects. LiDAR, however, models in three dimensions to give accurate depictions of shapes and postures. It can identify debris in the road and even differentiate between body postures helping discern if a person is about to step into traffic [12].
Enhanced Global Positioning — An autonomous vehicle’s onboard computing module needs to know not only where other cars, pedestrians, and obstacles are located, but also where the car it is controlling is positioned. Global positioning using trilateration signals from multiple satellites to narrow down the vehicle’s position to within 10 feet. While impressive, this is not nearly precise enough in this application. This inexactness is the result of GPS signal degradation owing to the multipath effect, variances in satellite orbits, delays in navigating through the atmosphere, and chronological divergence between satellites’ atomic clocks and receivers’ quartz clocks [14]. Installing inertial measurement unit sensors on autonomous vehicles compensates for these inaccuracies and allows real-time positioning precision to within an inch or two by applying adjustments that incorporate speed, drift, temperature, bias, and other variables between GPS updates [5].
Limitations and Technical Challenges
The autonomous vehicle industry has logged tremendous progress over the last decade. Still, fully autonomous vehicles remain elusive. As is often the case in mobility and logistics, edge applications have proven difficult to overcome. Current artificial-intelligence software and machine-learning algorithms have proven capable of managing close to 90 percent of all driving scenarios — even more under typical highway conditions. Yet, we still find ourselves years away from driverless travel. It is not only the technological aspects of full autonomy that blocks universal adoption. Legislative, environmental, philosophical, and emotional challenges also prevail [2]. Some of these limitations also must be overcome before semi-autonomous delivery vehicles can take hold and begin reducing congestion, pollution, and roadway accidents in the world’s urban centers:
1. Regulation and Legislation
This broad category encompasses governments’ desire not only to protect their citizens and create strong public policy, but also to ensure they collect sufficient revenues to keep their municipalities operating. Liability issues take precedence on the policy and protection front. Governments must decide who is responsible in case of an accident involving a driverless vehicle. The owner? The vehicle manufacturer? The sensor vendor? The software developer? A universal system for testing data security does not exist. Neither is there a standard means for recordkeeping, reporting, or safety standards [3]. In the financial arena, Washington has largely left the decision to states, who are understandably concerned about losing gas-tax revenues as the number of electric and driverless vehicles increase and the possible need to retrofit roadways to accommodate them.
2. Operating Conditions
Further research and testing may be required to demonstrate that these vehicles can perform under a variety of conditions: highways and surface streets; unpaved and rough roads; tunnels and construction zones; wet and icy surfaces; limited visibility and atmospheric interference; merging and yielding; gridlock; aggressive driving; and road rage.
3. Sensor Technology
Achieving economies of scale and other efficiencies to make autonomous vehicle sensors and operating controls affordable presents another challenge. As mentioned earlier, most companies in the space acknowledge the need to incorporate the various technologies outlined above to work collaboratively to ensure safety and performance. More testing is required to discern whether multiple driverless vehicles operating in close proximity would interfere with each other’s electronics. Positioning, resolution, and precision must be refined to enable the vehicles to make optimal decisions and take appropriate action.
4. Machine Learning
Real-world deployment is necessary to allow onboard computers to employ algorithms and update the data that autonomous vehicles will encounter. Artificial intelligence and machine learning will enable computers to not only “see” potential hazards, but also to evaluate the threats they pose and arrive at data-empowered decisions. Interpreting nuanced scenarios and making intuitive assumptions similar to humans’ abilities will make driverless vehicles safer than driver-operated versions, as machines will be able to process millions of inputs much faster than people can react. Until then, autonomous vehicles will continue to absorb data as they encounter new roads, objects, animals, and signage. It must be clear that the systems will categorize this new information properly and use it to augment or replace previously adopted behaviors as appropriate [3].
5. Public Acceptance
Surveys show that a significant number of people are not only reticent about riding in autonomous vehicles, but also are concerned about sharing the road with them. A recent Harvard study found that 43 percent of American drivers would feel less safe if they were driving among “small, self-driving delivery vehicles”. More than half also expressed concerns over where accident responsibility lies, how tests are conducted and overseen, and how to respond to the proximity of an autonomous vehicle [8].
TDK Ventures Strategic Outlook & Faction Technology
TDK Ventures views its investments in mobile technologies not only for the potential to realize extraordinary returns for our investors and portfolio companies, but also as a medium for leveraging many of the other advances on which we focus and as an opportunity to contribute to the greater good of humanity. Mobility investments in general and our stake in Faction in particular promise to achieve these objectives including: reducing the world’s dependence on fossil fuels, reducing the pollution associated with heavy traffic and internal combustion engines. Concentrating on electrifying delivery and other fleets rather than passenger vehicles leverages decarbonization efforts and alleviates many of the demand-driven charging capacity challenges other sectors of the industry may face. “[B]y targeting fleets, particularly those of larger operators, multiple vehicles can be transitioned to zero emissions at once; most fleets consist of commercial vehicles, which typically have a higher vehicle usage rate that private vehicles, hence higher CO2 emissions, than their non-commercial counterparts” [1].
Fully autonomous passenger vehicles may capture the imagination, but practical, existing use-case solutions, we believe, will deliver the next generation of profitable, difference-making business models. Faction is leading the charge to commercialize semi-autonomous vehicles leveraging teleoperation technologies. Its driverless vehicles incorporate the affordability and maneuverability of motorcycles with the speed and performance of cars to create small-scale delivery vehicles that will clear the way for smarter cities and a more sustainable tomorrow.
This niche of the autonomous vehicle market will reach a market value of more than $11 BN (USD) by 2028, representing a CAGR of 31.3 percent and a nearly eight-fold expansion over 2020 [7]. Two developments — one technological and one social — will drive the market. First, swift development of “sensor-processing technologies, adaptive algorithms, high-definition mapping and…vehicle-to-vehicle and infrastructure-to-vehicle communication technologies” have permitted rigorous on-road testing of highly automated vehicle prototypes [10]. Second, the impact of COVID-19 cannot be underestimated. The global pandemic accelerated the trend toward home shopping and delivery to the point where 54 percent of Europeans plan to permanently increase their online spending and more than one in four to permanently reduce the number of trips they take to physical retail and grocery locations [7].
TDK Ventures is aware that development throughout the autonomous vehicle industry traditionally progresses in waves. We expect this trend to continue, with each wave lasting roughly five years and potentially culminating with full-vehicle autonomy gaining acceptance and widespread adoption. This timeline fits a pattern that commenced around 2010, when theoretical models and driverless-car concepts coalesced into working prototypes. Once the prototypes proved their mettle in laboratories and closed circuits, the testing wave brought them to real roadways and scrutiny under real-world weather and traffic conditions. These tests validated the technology behind self-driving cars, opening the door to validation of business models and exploration of use cases where the tech can deliver real service and offer the prospect of supporting businesses and services built upon it [11]. Faction and other firms have entered the homestretch of an important slice of this phase. Faction has demonstrated that these vehicles can safely and reliably transport goods from the factory, store, and restaurant to customers in urban centers. Other sectors require several more years before the same can be said of transporting people, operating in rural areas, and conquering the edge tasks that currently necessitate human intervention through teleoperation.
Faction is gradually transitioning into the production and commercialization wave. Self-driving commercial vehicles, led by the scale-appropriate, three-wheel light-electric urban delivery units that Faction is perfecting, will enter mass production as companies begin the transition to driverless distribution as part of their digital transformation. As a first mover in this space, Faction is poised to leverage this rapid growth in the space and establish a competitive advantage it will exploit well into the final adoption wave, standardization. Here, driverless options become the standard in urban delivery and manufacturers enjoy steady growth through the technology’s maturation.
Why We Invested in Faction Technology
Rather than spending time and money in trying to perfect every detail required to bring fully autonomous electric self-driving vehicles to fruition, Faction is concentrating on what is possible today, leveraging existing technology to perform most self-driving tasks — hazard avoidance, lane integrity, route mapping, etc. Faction enlists teleoperators to assist in the remaining 20 percent of the driving tasks, high-level maneuvering through toll booths, detour selection, parking-garage maneuvers, and other specialized performances that could take decades to incorporate in driverless vehicles. This safe, cost-effective solution could revolutionize last-mile delivery for e-commerce companies, restaurants, and other urban-centered use cases.
Faction’s technology architecture is designed with driverless systems in mind, which allows it to incorporate new technology radically faster than legacy vehicle platforms. It has partnered with innovative companies to develop sophisticated teleoperation abilities, precise vehicle positioning, hazard recognition, and vehicle design to accommodate the 90 percent of urban trips that consist of one passenger traveling less than 5 miles. TDK shares Faction’s conviction that the current practice of using large legacy vehicles for these pursuits is not sustainable. Faction has demonstrated both prototype and pre-production vehicle systems. Electric propulsion and the three-wheel autocycle (regulated as motorcycles) chassis that alleviates significant load demands from the power train is both ingenious and instrumental to the product’s success.
With edge case still years — perhaps decades — from coming to fruition, Faction will both further the technologies and use cases necessary to complete the journey, but also accommodate current applications using both the technologies in use right now and its TeleAssist™ framework to fill the gaps current tech cannot yet manage.
Through this partnership, TDK Ventures seeks to expedite the development of a low-cost solution to urban delivery and travel-on-demand markets that mitigate emissions, gridlock, and energy consumption.
Recently graduated from the world-renowned Y-Combinator business incubator, Faction has assembled an experienced team previously responsible for the launch of driverless vehicles ranging from light EVs to full-size tractor-trailers. The sum of that experience and expertise backs development of the Faction fleet. TDK Ventures believes Faction ticks all the boxes in our investment checklist:
Founder: Ain McKendrick has devoted much of his career to exploring and realizing the potential of autonomous systems, including development of the first self-driving semi-trucks on U.S. highways. He is a tech maven, co-founding Palm Computing and working on revolutionary consumer-electronics products and services such as the Palm Pilot, TiVo, Netflix, and Dell computers.
Team: Faction’s lean team is heavy on mechanical and software engineering and design, and partners with leading technology developers to perfect vehicle positioning, sensing, and response.
Track Record: Faction’s team capitalizes on experience in AI, vehicle systems, vehicle safety, big data, sensors, hardware mounting, V2V communication, logistics, and more.
Technology: DriveLink® and TeleAssist™ technologies bridge the gap between autonomous operation controlling most of the driving tasks and completion of edge cases that require human input and decision making. These proprietary technologies will bring driverless vehicles online much more quickly than fully autonomous vehicles.
Moving Forward
Faction isn’t just a technology company; it’s a transportation and logistics company as well. In designing and developing its own fleet from the ground up in partnership with select vehicle manufacturers, Faction has created a new paradigm. Instead of trying to convert standard vehicles to autonomous electric vehicles and adapt them to driverless technologies, Faction is completely redesigning vehicles specifically to take advantage of self-driving technology, and free itself from the engineering and design shackles that burden the retrofitting process.
TDK Ventures sees its partnership with Faction as an ideal match in both vision and technology. The Faction mission dovetails perfectly with TDK Ventures’ desire to scale technologies that further the world’s digital, energy, and environmental transformations. Faction addresses all three components by applying a digital approach to a problem plaguing both the energy and sustainability space.
References
[1] Ben Dror, Maya, Jiten Vyakarnam, and Eric Hannon. “How to scale-up investment in sustainable mobility.” World Economic Forum, September 29, 2021. https://www.weforum.org/agenda/2021/09/how-to-scale-up-investment-sustainable-mobility/
[2] Bergmann, Lasse T., et al. “Autonomous vehicles require socio-political acceptance — an empirical and philosophical perspective on the problem of moral decision making.” Frontiers in behavioral neuroscience 12 (2018): 31. https://www.frontiersin.org/articles/10.3389/fnbeh.2018.00031/full
[3] Daley, Beth. “Autonomous cars: five reasons they still aren’t on our roads.” The Conversation, July 30, 2020. https://theconversation.com/autonomous-cars-five-reasons-they-still-arent-on-our-roads-143316
[4] Dickson, Ben. “Is camera-only the future of self-driving cars?” ADAS and Autonomous Vehicle International, May 23, 2022. https://www.autonomousvehicleinternational.com/features/is-camera-only-the-future-of-self-driving-cars.html
[5] Fennelly, James. “How can IMUs improve AV positioning accuracy and operational safety?” ADAS and Autonomous Vehicle International, February 6, 2021. https://www.autonomousvehicleinternational.com/features/how-can-imu-technology-improve-positioning-accuracy-and-operational-safety-for-avs.html
[6] Forslund, David, and Jon Bjärkefur. “Night vision animal detection.” 2014 IEEE intelligent vehicles symposium proceedings. IEEE, 2014. https://ieeexplore.ieee.org/abstract/document/6856446
[7] Fortune Business Insights. “Autonomous cars market size, share & COVID-19 impact analysis, by type (fully autonomous and semi-autonomous), by vehicle type (passenger cars and commercial vehicles), and regional forecasts, 2021–2028.” Fortune Business Insights. https://www.fortunebusinessinsights.com/industry-reports/autonomous-cars-market-100141
[8] Gladden, Devin. “Drivers should know if they are sharing the road with self-driving test vehicles.” Belfer Center for Science and International Affairs. Harvard Kennedy School, May 14, 2021. https://www.belfercenter.org/publication/drivers-should-know-if-they-are-sharing-road-self-driving-test-vehicles
[9] González, Alejandro, et al. “Pedestrian detection at day/night time with visible and FIR cameras: A comparison.” Sensors 16.6 (2016): 820. https://www.mdpi.com/1424-8220/16/6/820/htm
[10] International Transport Forum. “Automated and autonomous driving: Regulation under uncertainty,” 2015. https://cyberlaw.stanford.edu/files/publication/files/15CPB_AutonomousDriving.pdf
[11] Lango, Luke. “The smartest way to play the autonomous vehicle boom.” Nasdaq, June 24, 2022. https://www.nasdaq.com/articles/the-smartest-way-to-play-the-autonomous-vehicle-boom
[12] Seidel, Jamie. “Opening the eyes of autonomous cars: is LiDAR the key to safety?” Cosmos, June 17, 2022. https://cosmosmagazine.com/technology/ai/lidar-autonomous-cars/
[13] “Self-driving cars: The road from fantasy to fruition,” San Francisco Chronicle, July 14, 2017. https://www.sfchronicle.com/drivingthefuture/timeline/
[14] Vargas, Jorge, et al. “An overview of autonomous vehicles sensors and their vulnerability to weather conditions.” Sensors 21.16 (2021): 5397. https://www.mdpi.com/1424-8220/21/16/5397/htm
[15] Wetmore, Jameson. “Driving the dream. The history and motivations behind 60 years of automated highway systems in America.” Automotive History Review 7 (2003): 4–19.

